
发布时间:2013-09-16 09:02:13点击数:3511次
在低温光学系统内建立两级温区是红外弱目标双波段探测的基础和关键, 采用氦气压缩式制冷技术, 通过精密的结构、热、光学设计和分析, 实现了低温光学系统内两个低温温区的隔离与建立, 一级温区8 0 ~1 0 0 K , 二级温区4 0 ~8 0 K , 控温精度±0 . 5 K , 温区内最大温差2 . 4 K , 两温区独立控温、互不干扰, 克服了国内低温光学研究受液氮制冷对温度和使用条件的限制, 使国内低温光学的研究达到了具有更低工作温度和双温区同时工作的水平。
降低红外探测光学系统的温度, 可明显减少系统内部热辐射, 降低探测器背景噪声, 有效提高系统探测能力和灵敏度。随着航天事业及红外探测技术的发展, 探测目标温度的降低, 要求红外探测系统的工作温度更低, 同时也对探测系统提出了多波段探测的要求, 探测系统同时进行多波段的探测时, 由于不同波段受背景辐射的影响和探测器件低温性能的不一致, 各波段探测需要在不同的低温温度下工作, 从而为低温光学系统的研究提出了在系统内建立多级温区的要求。
20 世纪90 年代我国研制成功的低温光学系统,用液氮制冷, 温度控制在100 K 左右, 只具有单一温区。与单一温区低温光学系统相比, 两级温区系统的设计将更加复杂和难以控制, 不但要考虑同时将两个温区制冷到相应的低温, 还要进行独立的温度控制, 避免相互干扰和影响。
为建立两级温区的低温光学系统, 文中采用新型制冷技术, 通过精密的结构、热、光学设计和分析, 实现了低温光学系统内两个低温温区的隔离与建立, 控温精度分别达±0 . 5 K 和±0 . 2 K 。该设计克服了液氮制冷对低温光学系统工作温度和工作方向的制约, 提供给红外探测更低的温度和用两级温区进行探测的低温条件, 将有效提高低温光学系统红外探测的探测能力和灵敏度, 为红外目标的双波段探测奠定了良好的基础。
1、低温光学系统两级温区的建立
1.1、实验低温光学系统的设计
根据通常红外探测对中长波探测器工作温度的要求, 进行了相应一级温区 80~100 K, 二级温区 40~80 K 低温光学系统布置与设计, 可实现对红外目标的成像或探测, 如图 1 所示。
.jpg)
图1 实验光学系统布置图
光线经离轴抛物镜 M1、M2 组成缩束系统后, 被分光镜 Spliter 分光, 分别通过离轴抛物镜 M3、M4 聚焦在 HgCdTe 探测器 1 和 2 上。其中光学系统与中波探测器 1 均处于一级温区, 而对背景辐射更敏感的长波探测器 2 则单独处于工作温度更低的二级温区。
整个低温光学系统被放置在一个真空低温仓中,通过机械泵和低温泵抽真空, 可使仓内真空度低于1×10- 4Pa, 减少内部对流, 抑制仓内外的热交换, 保持仓内低温和温度平衡, 同时可以保持仓内清洁, 光学性能稳定。
1.2、系统低温绝热设计
低温光学系统工作状态下与真空低温仓的温差将大于 200 K, 同时一二级温区间的温差也将达到几十 K, 必须进行有效的绝热。
一级温区与真空低温仓间的绝热设计如图 2 所示, 热隔离用低导热率的高分子材料实现, 并采用了接触面很小的锥面配合结构做支撑, 极大减小了系统漏热率和漏热截面积。同时由该设计组成的 3 点沟槽式向心支撑结构还具有高精度自动复位, 保持光学系统低温视轴稳定的作用。低温光学系统一二级温区间的绝热同样采用低导热率的高分子材料隔离实现。
.jpg)
图2 一级温区绝热设计示意图
1.3、系统低温热平衡状态分析
在低温光学系统两个温区的温度已确定的情况下, 装在真空低温仓中, 经过适当的绝热设计, 其低温热平衡就是一个确定的稳态换热状态。
由传热学理论可得系统低温下一级温区、二级温区、真空低温仓间的换热关系, 如图 3 所示。
.jpg)
图3 低温光学系统热平衡热流图
由图可见, 系统低温热平衡时, 一级温区从真空低温仓吸热 5.23 W, 向二级温区放热 0.19 W, 向一级冷头放热 5.04 W, 从而达到平衡; 二级温区从一级温区吸热 0.19 W, 真空低温仓吸热 1.21 W, 向二级冷头放热 1.40 W, 以达到平衡。
1.4、系统两级温区的制冷
由低温热平衡分析可知: 系统对制冷能力的要求为一级大于 5.04 W, 二级大于 1.40 W。通常液氮制冷能够获得的低温仅为 80 K, 若同时进行两个温区的制冷, 系统会更复杂和难以控制。
采用两级氦气压缩式制冷对系统两级温区进行制冷, 具有制冷温度低、制冷功率大、分级制冷的特点, 其制冷功率一级在 77 K 时达 65 W, 二级在 20 K时达 7 W, 最低制冷温度空载时, 一二级分别为 45、16 K, 满足系统低温要求。
系统两个温区与制冷机冷头间的热传导采用铜带作软连接实现, 以避免制冷机工作时的振动和装配时对光学系统的位置干扰, 如图 4 所示。
.jpg)
图4 制冷传热软连接示意图
经有限元优化设计, 使其在有足够的导热能力时仍保持一定的柔性。当冷头与各温区间存在 50 K 温差时, 向一二级温区最大传热量分别为 47.2 W 和 7.4 W。据此计算, 系统一级温区降温时间为 7.5 h, 二级温区降温时间为 3 h。
1.5、系统两级温区的温控
制冷机一级冷头的温度在 45~320 K 之间任意可控, 故一级温区的温度控制是通过调节制冷机一级冷头的温度进行的。结合系统特点, 采用先粗调, 再微调的控温方式, 理论控温精度达±0.5 K。
二级温区的控温由于受制冷机二级冷头控温范围的影响, 在高于 30 K 后不能控制, 故采用单独加温控仪控温的方式, 采用双传感器、双加热器控温, PID控温精度达±0.5 K。
为避免低温下各温区内温差过大引起系统变形,对系统一二级温区控温平衡后的温度分布进行了有限元模拟, 如图 5、图 6 所示。
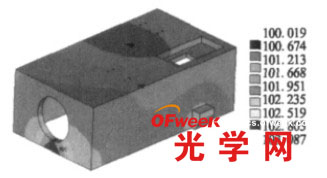
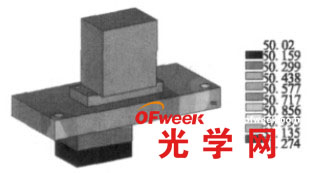
图5 一级温区10 0 K 低温分布模拟 图6 二级温区50 K 低温分布模拟
由图可见, 降温平衡后一级温区内最大温差仅 3.1 K 左右, 二级温区内最大温差仅为 1.3 K, 温度梯度小于 0.08 K/cm, 温度均匀性良好。经热力学耦合分析, 在此温度梯度下各温区光学平台的最大热变形为 1.2 μm, 仅引起光学平台倾 斜 0.38″,对系统成像质量的影响可以忽略。
2、低温测试实验结果与分析
根据设计与分析结果, 建立该两级温区低温光学实验系统, 结果如图 7、图 8 所示。
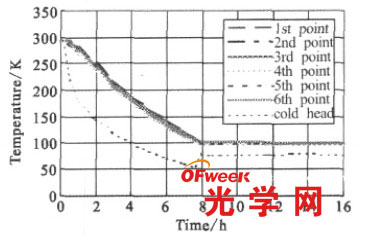
图7 一级温区低温实验结果
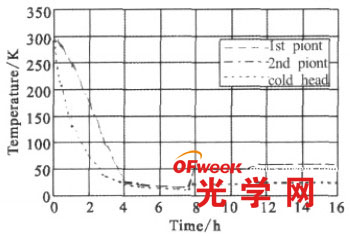
图8 二级温区低温实验结果
由图 7 可见: 一级温区制冷开始后约 7.8 h 降到102 K, 进入程序控温, 温度逐渐稳定在 99.5 K, 平衡后温区内分布于各处的6个测温点测量值分别在99.5、100.4、100.1、100.2、99.6、98.0 K 左右, 最大温差2.4 K。
实验结果显示: 一级温区的制冷能力和铜带导热能力适当、控温合理, 7~8 h 后就能够顺利实现 80~100 K 的制冷与控温。降温时间与理论分析的 7.5 h较符合, 温区内最大温差 2.4 K, 小于有限元模拟结果 3.1 K, 具有良好的温度均匀性。
由图 8 可见: 二级温区制冷开始后 3 h 即可降到50 K 以下, 启动温控后温区内控温点先后很快稳定在 50 K±0.1 K、60 K±0.1 K 内, 在控温达到平衡时,温区内 2 个测温点温差在 0. 5 K 以内。
实验结果显示: 二级温区制冷能力足够, 控温及时准确, 3.5 h 后就能够顺利实现 40~80 K 的制冷与控温, 具有良好的温度均匀性。降温时间与设计值3.2 h 稍有出入, 这是由于制冷机功率在高温阶段数据不确切造成的。
3、结 论
在低温光学系统的研究中, 采用新型制冷技术,通过系统的结构、热、光学设计和分析, 顺利实现了低温光学系统一级和二级两级温区的隔离与建立, 使国内低温光学技术达到了液氮以下温度和双波段探测的低温水平。
实验结果表明: 系统性能稳定, 一级温区能够任意设定在 80~100 K, 控温精度±0.5 K, 温区内最大温差 2.4 K, 满足系统中波探测的要求; 二级温区能够任意设定在 40~80 K, 控温精度±0.2 K, 温区内最大温差 0.5 K, 满足系统长波探测的要求。在我国低温红外探测器在液氮氮点以下的性能测试数据缺乏的情况下, 将为进一步研究探测器和整个低温光学系统的探测性能提供良好的条件。(作者:任栖锋、沈忙作、廖 胜、谭述亮、韩维强)
微米是长度单位,符号 [micron],读作[mi
光栅分为3D立体光栅,光栅尺,安全光栅,复制光栅,
冷加工与热加工的区别是什么?冷加工通常指金属的切削加工
光学冷加工工艺 第1道:铣磨,是去除镜片表面凹
ps滤镜怎么安装?滤镜主要是用来实现图像的各种特殊效果
光密度(OD)[optical density]定义
滤光片主要特点是尺寸可做得相当大。薄膜滤光片,又分
减反射膜又称增透膜、AR膜、AR片、减反射膜、AR
鲍威尔棱镜是一种光学划线棱镜,它使激光束通过后可以最优化
虹膜特征 眼睛的虹膜是由相当复





